
Hybrid Hierarchical Learning for Solving Complex Sequential Tasks Using the RObotic MAnipulation Network - ROMAN
Published in Nature Machine Intelligence, 2023
Recommended citation: Eleftherios Triantafyllidis, Fernando Acero, Zhaocheng Liu, Zhibin Li (2023). "RObotic MAnipulation Network (ROMAN) - Hybrid Hierarchical Learning for Solving Complex Sequential Tasks." in Nature Machine Intelligence (NMI) 2023. https://www.nature.com/articles/s42256-023-00709-2
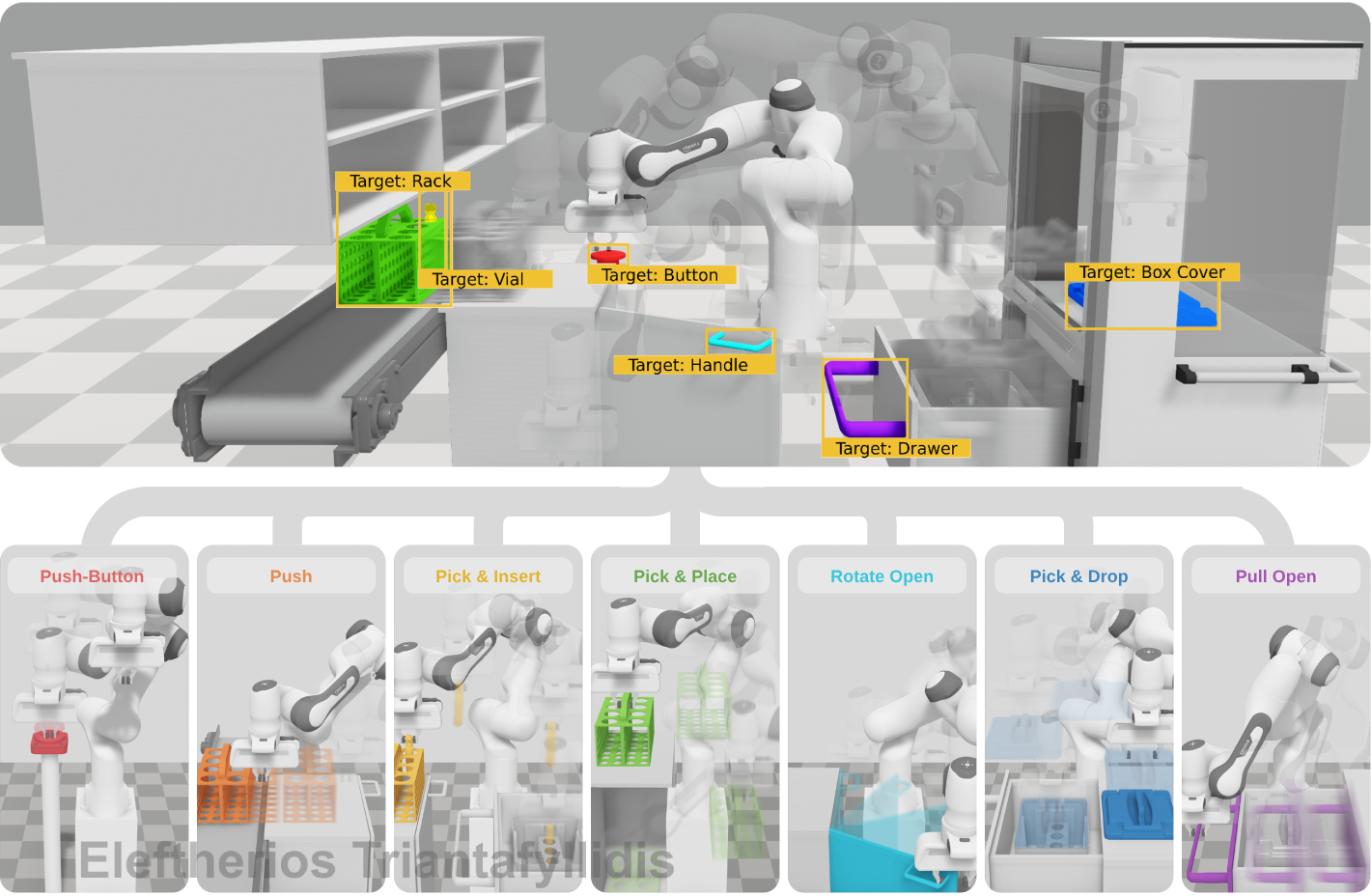
This paper presents a novel framework known as the Robotic Manipulation Network (ROMAN). ROMAN is biological-inspired Hybrid Hierarchical Learning (HHL) architecture to address the challenges of complex long-horizon sequential robotic manipulation tasks that furthermore entail sparse rewards.