
Intrinsic Language-Guided Exploration for Complex Long-Horizon Robotic Manipulation Tasks
Published in International Conference on Robotics and Automation (ICRA), 2024, 2024
Recommended citation: Eleftherios Triantafyllidis, Filippos Christianos, Zhibin Li (2024). "Intrinsic Language-Guided Exploration for Complex Long-Horizon Robotic Manipulation Tasks" in International Conference on Robotics and Automation (ICRA), May 2024, Yokohama, Japan. https://arxiv.org/abs/2309.16347
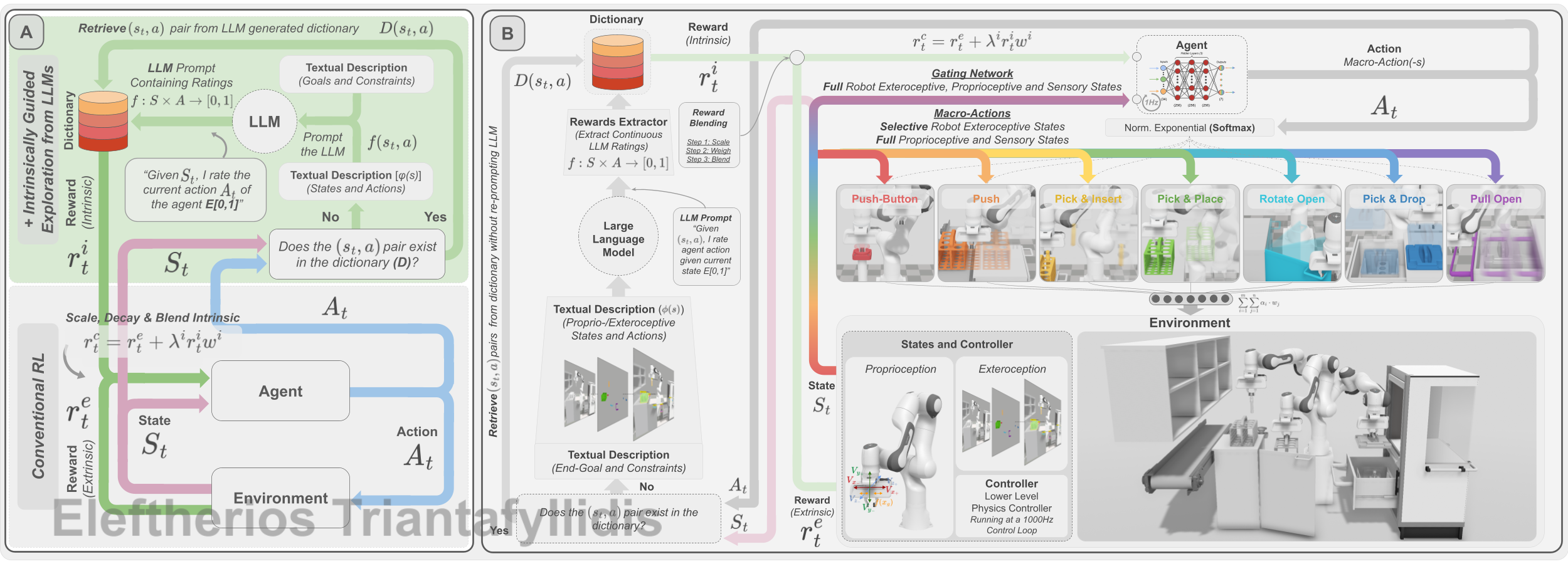
This paper presents a new approach called Intrinsically Guided Exploration from Large Language Models (IGE-LLMs) to enhance reinforcement learning in complex, feedback-sparse environments. IGE-LLMs utilize language models to guide exploration effectively. Stay tuned for ICRA 2024!